

Wednesday and Thursday was spent in the lab. There was a problem with the payload computer which prevented us from using the payload until Friday. In the meantime we sealed the vehicle, did a lab checkout, synced the system clocks, and improved the sonar and hydrotech software. We finally arrived at the quarry on Thursday evening.

On Friday, January 5th we cleared the launch area and put the vehicle in the water. We immediately noticed spurious problems with the deadreckoning, though it was working well otherwise (it brought us back to within a meter of the starting point on a 200m run). Initially we believed the problem was with the IMU and tried several different alignment procedures over the next few days. We then determined that the problem was with the DVL, it would occassionally dropout, particularly in one region. By Monday we had a solution; a kalman filter now helps smooth data streams from the IMU and DVL, it can handle short dropouts very well but long dropouts cause us to abort.


While debugging deadreckoning, we simultaneously continued work in other areas. Friday through Monday we tested new timeouts in a navigation control loop, collected sonar data (and noted a failed bank), improved wall approaches and exercised other functionality. We did hit a few problems however; on Saturday we found that we were negatively buoyant and observed a steady stream of bubbles (believed to have come from the VBS).


On Tuesday the 9th SWRI arrived and noted significant problems with the sample arm and flow cell. The following day a film crew was present getting interviews throughout the day. On these days we collected high-quality data sets on the north shore and in the southeastern regions. Also we operated after sunset, this was made possible by afternoon charging cycles (since the vehicle had to be on shore).


Finally Thursday the 11th was our last day. SWRI returned and John Spear arrived, so the morning was spent looking at the various sensors. We then ran two missions covering the entire quarry, the second one was completely untethered and mostly successful (the run aborted autonomously after detecting significant dvl dropouts). Based on those results, we believe we can safely operate the vehicle and generate a map of the environment.
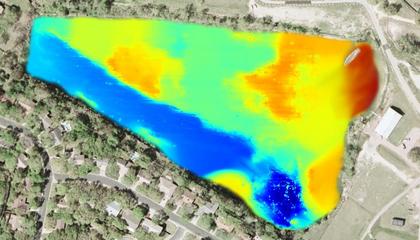
This is a preliminary map of the quarry where depth is represented by color; red is at the surface and blue is about 12 meters (40 feet) deep. This data was pasted on top of a screenshot from Google Earth to give some context.

