Obstacle avoidance - micro air vehicles
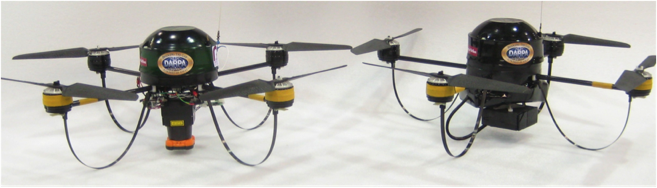
During a DARPA Seedling program in 2008, we developed two different obstacle-detection/collision-avoidance payloads that flew on commercially-available AirRobot quadrotor helicopters. We took the same laser sensing modality used on our RMax helicopter, and shrunk it down from 30 kg to less than 400 grams. The payloads were completely self-contained, including sensing, computing, power, and communications.
Payload 1 (left in picture above) uses a commercially available planar laser scanner that weighs 230 grams and has a 30-meter range. It cannot detect wires. Payload 2 (right in picture above) uses an in-house custom planar laser scanner. This scanner weighs 140 grams with a range of 400 meters and wire detection at 50 meters.
Both aircraft demonstrate the ability to navigate to arbitrary GPS waypoints in unmapped outdoor terrain without colliding with obstacles such as trees or buildings.
Publications:
Efficient C-Space and Cost Function Updates in 3D for Unmanned Aerial Vehicles
Sebastian Scherer, David Ferguson, and Sanjiv Singh
Proceedings International Conference on Robotic and Automation, May, 2009
Hovering Micro Air Vehicles, or “MAVs,” promise new missions in the near future. They can fly slowly near the ground to track targets, inspect ground structures, and provide low-altitude surveillance. However, recent attempts to field MAVs in military settings have shown that the vehicles are prone to collisions with obstacles. It is very difficult for an operator to have the situational awareness to keep the vehicle from hitting a building or power line.