David Wettergreen

I create robots to explore the Earth and planets. I research robotics to enable exploration and lead investigations that develop and apply new methods and technologies for exploration.
Exploration is seeking to experience and understand the unknown. It results in discovery through diverse and methodical observation and analysis. An explorer is distinguished not by narrowly focusing an observing strategy on a specific hypothesis but instead by broadly collecting, examining, and interpreting information over many dimensions. Successful explorers discover new knowledge that can answer questions not yet posed.
My work in robotic exploration spans concept creation through system synthesis to field experimentation. Addressing all phases of research and development of robotic systems is important. In particular experimentation in the field is crucial because this is where methods, algorithms and robots are validated so that scientific exploration can then be undertaken.
I apply robotics underwater, on the surface, in the air and to space and seek investigations that advance technology into challenging domains for scientific exploration. To accomplish this I research perception, planning, learning, and autonomy. I create robots that independently interact with their environment and that must, to some extent, behave autonomously to survive and function. A robot’s abilities to sense and perceive, to plan and act, and then to move and react, all are integral to functioning independently in the world. All of these abilities are needed for exploration.
Robotic Exploration
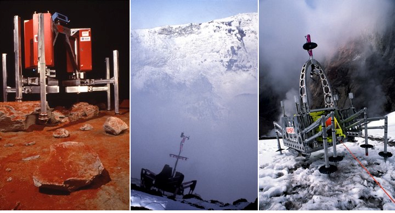
Ambler planetary rover prototype, 1990, Dante I descending into Mount Erebus, Antarctica, 1992, and Dante II walking into Mount Spurr, Alaska to sample gas from active fumaroles in floor of the volcanic crater, 1995
The practical and economic reasons for using robots to explore the planets, moons and asteroids are clear: the risks are high, resources are scarce, and communication is limited. To answer profound questions about the past, present and future of life and the nature of our solar system, effective robotic systems are crucial. In underwater environments, technologies for visual servoing, sonar-based localization and mapping, and learned control can transform the safety and efficiency of operation. In air, atmospheric studies will develop from periodic sampling to perpetual robotic presence for monitoring and investigation. On Earth, in remote and hazardous regions where both precision and endurance are required, there are myriad applications for robotic explorers.
I expect that science robots will become commonplace, operating on the land, sea and air of the Earth and in space engaging in scientific discovery and meaningful work. My aim is to discover the knowledge and techniques needed to realize the full potential of robotic exploration. I am concentrating on several areas of research that are fundamental: endurance navigation, robust autonomy, and scientific data understanding.
Endurance Navigation
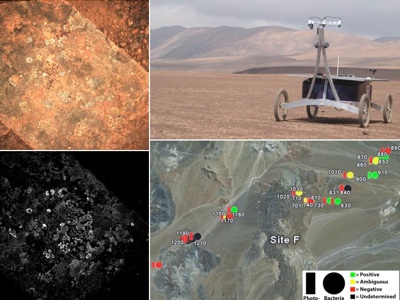
Zoë in the Atacama Desert, 2005. In over 250 km of autonomous traverse to 100 science sites, observations including bio-fluorescence images of were made to produce first ever biogeographic maps.
In my work enabling robots to map the distribution of microorganisms in desert environments, the ability to perform multi-kilometer autonomous traverse is essential. This new capability for robotic survey pioneers a method of science investigation that reveals regional as well as local characteristics. I formulated the robotic survey approach and have fostered the development of endurance navigation that has now proven the feasibility of single-command, multi-kilometer traverse and resulted in over 250 kilometers of autonomous survey in the Atacama Desert of northern Chile.
How do we enable robots to sustain efficient exploration? Exploration by its nature involves uncertainty. This must be addressed in a variety of aspects. My continuing navigation research dynamically accounts for uncertainty in localization at multiple scales by maintaining topological structures of metric observations: satellite overviews, far-field perception, and near-field terrain models. Dynamic features and time-varying aspects of the environment are also detected and modeled. As localization is refined, multi-scale information is registered and fused to improve terrain evaluation. Perception over distances, in the far-field and from remote sources, is needed for endurance. I am working on methods of applying sparse information in the distance to better inform immediate navigation decisions. Eliminating any gap between what robots can perceive locally and what they know globally is vital for robots to explore efficiently.
Robust Autonomy

DEPTHX explored flooded sinkholes in Mexico, 2007, using sonar mapping and localization to build the first volumetric model and autonomously collecting biologic samples that contained unknown sulfur-metabolizing microorganisms.
Resource-cognizant planning enables robots to reason about available resources. For example, a solar-powered robot must choose actions that provide sufficient energy by avoiding shadows and orienting in synchrony with the sun. Field experiments that I led in the Canadian arctic proved the concept of sun-synchronous exploration by enabling robots to manage their energy balance while reaching science goals.
My work in underwater exploration involves enabling a robot to autonomously map and sample flooded cave systems in central Mexico. The investigation demanded resource-cognizant planning with even greater consideration of consumable resources, like battery energy, pressurized gas, and sample storage, and with more diverse activities including instrument observations and sampling operations. Applying specializations of simultaneous localization and mapping the robot was able to explore and reach the bottom, at 318 m, of the world’s deepest cenote. The innovations include algorithms to recognize location by geometric structure rather than specific features, for contingent plan execution for fault recovery, and to efficiently model fully three-dimensional environments for evaluating multiple hypotheses of map and location. I am applying these techniques to other feature-poor natural environments.

Virtual Dashboard remote exploration interface was created for the Nomad rover and improved scientist awareness. The first science on the fly experiments used this tool and resulted in first remote identification of a fossil from a rover, 1997.
How should we conduct remote investigations? New techniques for autonomous exploration paradoxically introduce the need to examine human-robot interaction and to establish a methodology of remote investigation. In order to define effective methods of remote investigation, I am collaborating with planetary scientists to study mission operations and establish an understanding of how scientists relate to robot explorers, how they can guide robots most effectively, and how this affects the quality of scientific results.
Understanding Science
Robotic explorers, while not able to formulate hypotheses or draw conclusions from their investigations, must act autonomously to seek, measure, record, verify and reduce information. Science autonomy means enabling robots to reason about scientific objectives and methods, or more explicitly, to possess a model of science objectives, a method of evaluating observations, and the ability to modify exploration behavior and plans.
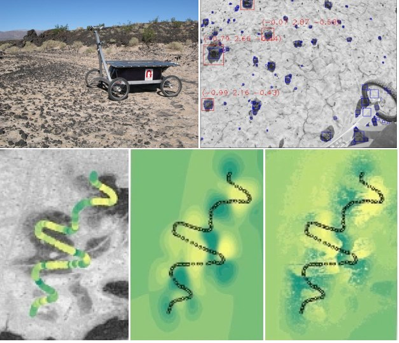
Zoë in Amboy lava flow, 2007, automatically detecting and classifying rocks and soils and determining information-maximizing path to create geologic maps on the fly.
I am investigating techniques for detection and classification in the domain of natural features. Identifying rocks, soils, and geologic boundaries requires diverse methods of image analysis and probabilistic classification. Working with imagery from the Atacama desert, or from Mars, robots may now automatically count particle (rock) size and distribution, distinguish regional characteristics, and make decisions about geologic boundaries that can be used to inform exploration strategy and distribute observations in ways that maximize efficiency and value.
How can robots understand and act on the goals of a scientific investigation? Work in science autonomy will improve the effectiveness by which instrument data can be analyzed, reduced and conveyed to scientists. I envision robotic explorers with sufficient modeling of geologic, biologic, and natural processes that they can intelligently map regions, making the most effective observations, while using fewer resources. This will dramatically improve the quality of their scientific results. The embodiment of science autonomy will transform robots from automated vehicles into true explorers.
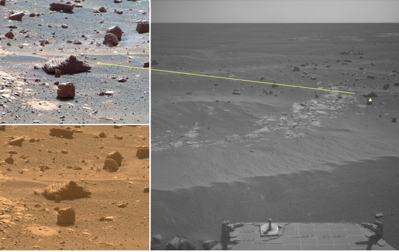
Mars Rover Opportunity automatically selects rocks from panoramas, collects additional images, and transmits them to Earth for greater efficiency and scientific return, 2010.
Field Experimentation
The deployment of robots in challenging environments is the unifying and sustained theme in my work, it motivates the systemic view that I take of research and it leads to field experimentation, which is essential to advancing robots as tools for science.
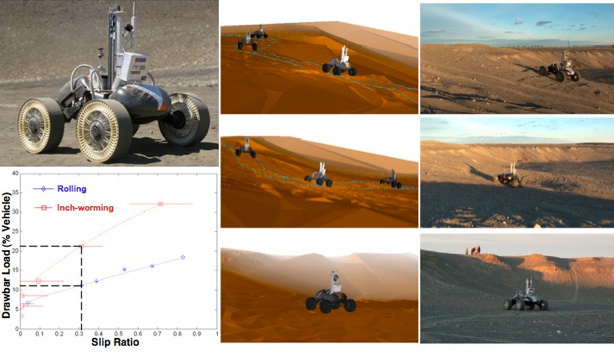
Scarab lunar rover on Mauna Kea, Hawaii and Moses Dunes, Washington, 2008 testing traction and mobility on analogue soils and long-distance navigation between drill sites including autonomous slope descent in cratered terrain.
I am convinced that field experimentation provides necessary verification and validation of research progress, as well as essential grounding and motivation. It is by fielding systems and making discoveries that we can prove the potential and importance of robotic exploration.
Research Approach
My approach is to create and deploy robots that explore challenging environments. The innovations that I pursue advance robotic navigation, autonomy, and science understanding, and establish effective processes for creating robotic systems. These techologies will help us in prospecting for ice on the Moon, seeking evidence of life on Mars, surveying the planetary surfaces, and accessing extreme places to understand the nature of life on Earth.
Scientific investigations provide a compelling context to communicate the purpose and value of robotic exploration and an opportunity to engage the public and to communicate broadly the benefits of robotic technology to everyone.
